视觉识别装置
目前煤矿巷道开采是以测绘科标定的的激光指向仪打出的激光斑点为唯一的方向指引,而我们的方案正是在标定的激光指向仪的基础上进行开发,平稳过渡,可保证方案成熟可靠。该装置由4K超高清定焦摄像机、前距超声波传感器、防尘装置等组成,通过高清摄像机捕捉激光斑点画面,利用图像处理算法,计算出红点x,y轴像素坐标,再将其转换为距离值,即可得出截割前后红点的偏移量,PLC会根据红点位置考虑车身的俯仰角、翻滚角、车身距左右两侧的位置、红点的位置等等变量因素,规划出正确的截割路线,保证掘进机一直沿着正确的方向掘进。
我司采用的“激光指向仪+机器人视觉识别+图像处理算法”的导航技术,是我司自主研发设计,市场上独有的技术方案。目前煤矿巷道开采是以测绘科标定的的激光指向仪打出的激光斑点为唯一的方向指引,而我们的方案正是在标定的激光指向仪的基础上进行开发,平稳过渡,可保证方案成熟可靠,航向误差可控制在4cm以内。
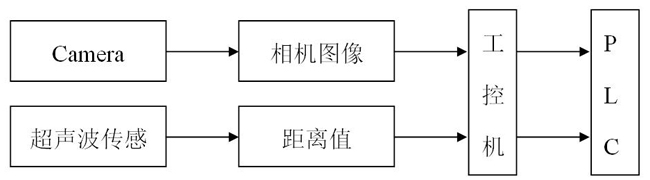
硬件部分,本研究根据使用的传感器硬件接口,基于TCP/IP、4-20mA等通讯接口、模拟量接口的数据采集方法,实现高精度的数据同步,示意如下图所示。
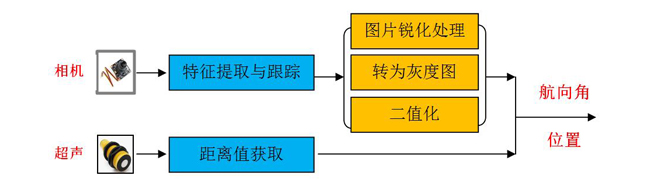
软件部分,软件算法的框图如下图所示。系统的输入是图像、距离值,输出是设备的姿态和位置。